新的控制系统可能使类人机器人能够做重物和其他需要体力的任务。
有一天,从燃烧的建筑物、化学品泄漏或人类无法应对的任何灾难中营救受害者,可能成为适应性强、适应性强的机器人的任务。例如,想象一下,救援机器人可以四肢着地穿过瓦砾,然后用两条腿站起来推开沉重的障碍物,或者突破一扇锁着的门。天富平台
工程师们在四足机器人的设计上取得了长足的进步,使它们能够奔跑、跳跃甚至后空翻。但是,如何让两条腿的类人机器人在不摔倒的情况下用力或推东西,一直是一个重大的绊脚石。
现在,麻省理工学院和伊利诺伊大学厄巴纳-香槟分校的工程师们开发了一种方法来控制两条腿的遥控机器人的平衡——这是使人形机器人能够在具有挑战性的环境中执行高强度任务的关键一步。
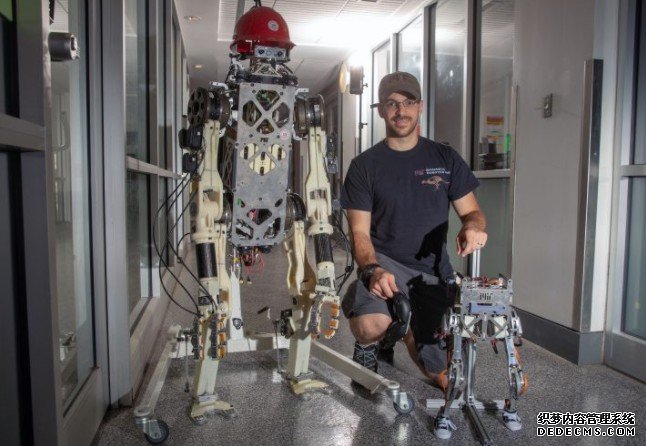
该团队的机器人在外形上类似于一个机械加工的躯干和两条腿,由一个穿着背心的人类操作员远程控制,该操作员会向机器人传送人类运动和地面反作用力的信息。
通过背心,操作者既可以指导机器人的运动,又可以感受机器人的运动。如果机器人开始翻倒,人就会感觉到背心被相应的拉紧,从而可以进行调整,使自己和机器人同步地重新平衡。
在测试这种新的“平衡反馈”方法的实验中,研究人员能够在机器人跳跃和行走时远程保持机器人的平衡,与它的人类操作者保持同步。天富平台
“就像一个沉重的背包,你可以感觉到你背包的动态移动,你可以补偿得当,“若昂拉莫斯说,谁开发的方法作为麻省理工学院博士后。“现在,如果你想打开一扇很重的门,人类可以命令机器人将身体推到门上并把门推开,同时不会失去平衡。”
拉莫斯现在是伊利诺伊大学厄巴纳-香槟分校的助理教授,他在今天发表在《科学机器人》杂志上的一项研究中详细介绍了这种方法。该研究的合著者是麻省理工学院机械工程副教授金相贝。
多运动
此前,基姆和拉莫斯制造了两腿机器人HERMES(用于高效机器人机械和机电系统),并开发了通过远距离操作模仿操作者动作的方法。研究人员称,这种方法具有一定的人文优势。
拉莫斯说:“因为你有一个可以在飞行中学习和适应的人,机器人可以通过远程操作完成它以前从未练习过的动作。”
在演示中,赫尔墨斯把咖啡倒进杯子,用斧头砍木头,用灭火器灭火。
所有这些任务都涉及到机器人的上半身以及匹配机器人与操作者的肢体位置的算法。赫尔墨斯能够进行高冲击的运动,因为机器人是扎根在一个地方。在这些情况下,保持平衡要简单得多。如果机器人被要求采取任何措施,然而,它可能会将在试图模仿操作员的动作。
“我们意识到,为了产生大的力或移动重物,仅仅模仿动作是不够的,因为机器人很容易摔倒,”Kim说。“我们需要复制操作员的动态平衡。”
小爱马仕(Little HERMES)登场了,它是爱马仕的迷你版,大约是成年人平均身高的三分之一。该团队将机器人设计成一个躯干和两条腿,并专门设计该系统来测试下半身的任务,比如移动和平衡。和它的全身版本一样,“小爱马仕”也是为远程操作设计的,操作者穿着背心来控制机器人的动作。
为了让机器人模仿操作员的平衡,而不仅仅是他们的动作,团队必须首先找到一种简单的方式来表现平衡感。拉莫斯最终意识到,平衡可以归结为两个主要成分:一个人的质心和他们的压力中心——基本上,就是地面上施加的一个力等于所有支撑力的点。
拉莫斯发现,质心相对于压力中心的位置,直接关系到一个人在任何给定时间的平衡程度。他还发现这两种成分的位置可以用倒立摆来表示。想象从一边到另一边摇摆而呆在同一个地方。其效果类似于一个倒立的钟摆的摇摆,顶端代表一个人的质心(通常在躯干),底部代表他们在地面上的压力中心。