俄耳甫斯潜水机器人正在由伍兹霍尔海洋研究所和喷气推进实验室开发,以自主探索深海。俄耳甫斯使用基于视觉的导航,其工作原理类似于独创性火星直升机在飞行中的导航。来源:美国国家航空航天局/姓名天富代理分红
地形相关导航帮助“毅力”在火星上着陆,“独创性”在火星上自主飞行。现在是时候测试一个类似的系统,同时探索另一个前沿领域。
5月14日,美国国家海洋和大气管理局(NOAA)的“奥基诺斯探险者号”(Okeanos Explorer)从佛罗里达州的卡纳维拉尔港出发,开始了为期两周的探险活动。这次探险由NOAA海洋探索公司(NOAA Ocean Exploration)领导,主要是进行自动水下航行器的技术演示。这种新型潜水机器人名为俄耳甫斯(Orpheus),它将展示一个系统,帮助它找到方向,并识别海底有趣的科学特征。
2月18日,美国国家航空航天局(NASA)的“火星2020”(Mars 2020)“毅力”(Perseverance)火星漫游者在这颗红色星球上精确着陆时,地形相对导航技术发挥了重要作用。该系统可以让正在下降的机器人直观地绘制火星景观,识别危险,然后选择一个安全的地方降落,无需人工协助。与此类似,nasa的“独创性火星直升机”(ingenious Mars Helicopter)在飞行过程中使用一种基于视觉的导航系统来跟踪地面特征,以便估算其在火星表面的运动。天富代理分红
NASA位于南加州的喷气推进实验室(Jet Propulsion Laboratory)的工程师开发了一种基于视觉的导航技术,这种技术曾在火星上使用,现在将在离家更近的地方进行试验:美国东海岸的大西洋上。
俄耳甫斯潜水
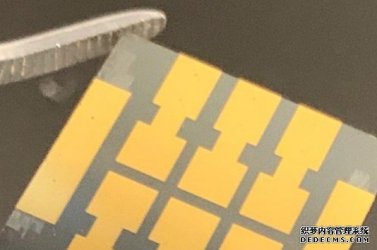
这台潜水器可以探索海洋最深处,绘制海底的3D地图。这张照片是在之前的一次探险中拍摄的,俄耳甫斯号比其他潜水器要小得多,因此更容易运输和操作。来源:美国国家航空航天局/姓
通常需要像声纳这样的大型大功率定位设备来导航海底附近黑暗而又浑浊的水域。通过使用低功耗的摄像机和灯光系统以及先进的软件,俄耳甫斯比大多数深海潜水器轻一个数量级。俄耳甫斯比四轮自行车还小,重约550磅(250公斤),在探索大多数车辆无法到达的深度时,它被设计得灵活、易于操作、坚固耐用
由伍兹霍尔海洋研究所(WHOI)与喷气推进实验室合作设计,俄耳甫斯可以在海洋的任何地方,包括最极端的深度,不受限制地工作。最终,该项目团队希望看到一群水下机器人组成一个团队,为深渊区(深度超过20000英尺(6000米)的未勘探海底的广大区域绘制3D地图。但在机器人探索这些深度之前,它必须先在较浅的水域测试其速度。
潜入未来
喷气推进实验室的机器人机械工程师拉塞尔·史密斯说:“这项技术演示将用于收集数据,以证明在海洋中地形相对导航的可行性,同时也展示了多个机器人如何在极端环境中协同工作。”“这些测试将让我们步入正轨,开始未来深入深渊区,并智能地寻找高生物活性的令人兴奋的区域。”
俄耳甫斯的视觉导航系统被称为视觉惯性测程(visual-inertial odometry,简称xVIO),其工作原理是使用先进的摄像机系统、模式匹配软件以及能够精确测量其方向和运动的仪器。当俄耳甫斯在海底航行时,xVIO识别出了飞船下方的岩石、贝壳和珊瑚等特征。就像在公路旅行中记住地标一样,xVIO将使用这些功能构建3D地图,作为导航点。但这个系统不仅仅是防止潜水机器人迷路的一种手段。